While I am waiting for the last of the components I need, one thing I can do now is learn how the radio works. This is my first time working with a programmable multi-channel radio/receiver setup like this, so I'll need to educate myself on binding and programming it.
After throwing some batteries (8 AA) into the radio and turning it on, so far so good.
The next stop is to bind the receiver to the transmitter. The radio comes with a corresponding receiver which goes into the quad (or whatever you are using it for) to receive the signals from the controller and send them to the flight controller. To "bind" them simply means to establish the link between them. A quick youtube search quickly yielded results.
The receiver comes with a "bind" plug, which is a loop that just jumps 2 pins together on the bind port of the receiver when plugged in.
Also you need to be able to get power to the receiver as well. The way a radio receiver is normally powered (the flight controller too, actually) is by receiving power from one of the four electronic speed controllers. (ESCs)
This is where I had to improvise a bit, since I do not have the proper connectors yet to connect the quad battery. I do however, have a Traxxas Slash with a perfectly good battery and speed controller, so I decided to use that for the purposes of binding the radio and doing some experimentation. Using YouTube as a general guide, I plugged the ESC into channel 3 of the receiver, plugged the battery into the ESC, and powered on the ESC. The connectors are universal. Sure enough, the red light on the receiver began flashing, indicating it was ready to bind.
The actually bind procedure is incredibly simple. With the transmitter powered off, you hold down the bind button on the back of it, and switch on the transmitter. The transmitter beeps once, and the light goes solid indicating a successful binding. Easy peazy.
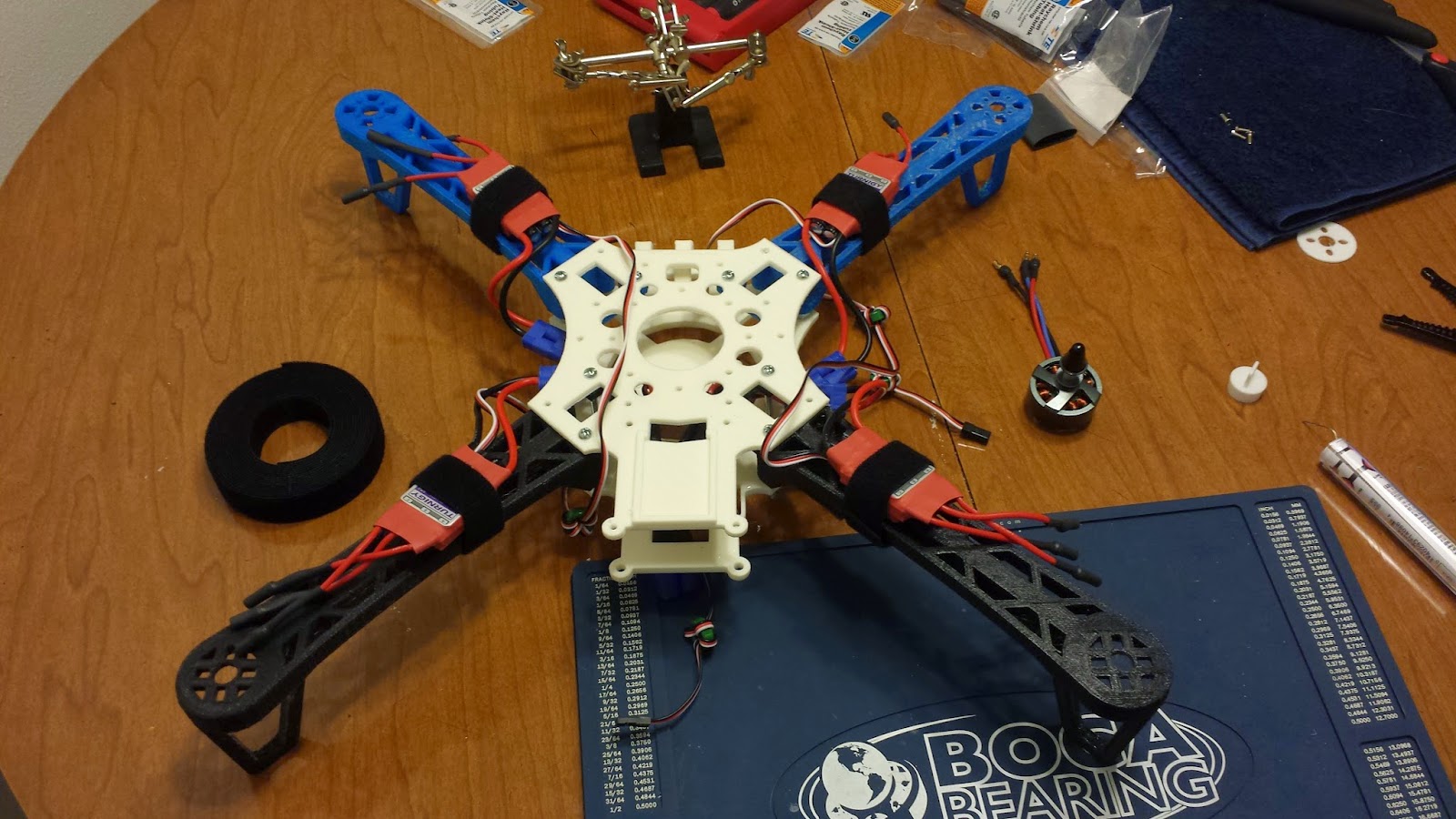
 |
| The setup I used to bind my transmitter. |
Now that was in experimentation mode, I figured I would see if I could play around with this a bit, and see if I could actually control the steering or throttle of the car by using the outputs of the radio. After plugging the servo into a few of the channels and trying the controls, I got the steering to respond perfectly to the right control stick. The throttle was a bit tricky, and at one point, the throttle got stuck on maximum with the car on my kitchen table, the wheels landed on the entire 53 page manual for the radio that I had printed which flung paper everywhere, the cat took off and hid under the bed, and the whole thing ended with me holding up the car by the back bumper (like holding a shrieking possum by the tail) and disconnecting the battery with my other hand.
Eventually I got it set up to where I could even drive the car. I got the throttle set up on the left stick, with zero as the midpoint and then forward and reverse, and the steering on the right stick. It's cumbersome and really awkward to drive an RC car with an airplane controller, I wouldn't recommend it, but this is about experimentation and was a way for me to learn a few things about radio setup without having the quad ready. I even connected one of the flashing LEDs to the landing gear switch.
I didn't touch the throttle in this video because the car is sitting on the Boca Bearings conference room table, but it does work.
This radio has a ton of settings and adjustments you can make, so I recommend studying the manual and testing out some things for yourself.
A few things:
Here is the video I used to find out how to bind the Turnigy 9x - https://www.youtube.com/watch?v=zuJgfA3_Jqw
Links to the Turnigy9x manual:
Part 1 - http://www.hobbyking.com/hobbyking/store/uploads/529892926X11510X47.pdf
Part 2 - http://www.hobbyking.com/hobbyking/store/uploads/529892926X11510X33.pdf
Now I can more forward with my project confident that I have a working radio, and that I know a little something about how to use it.....











.jpg)


.jpg)



.jpg)
.jpg)